
Voici les principaux sites qui m’ont aidé :
instructables.com, blogouillage.net, project238.blogspot.fr, robovergne.com et pour finir : lafamillecreative.blogspot.fr. Vous trouverez beaucoup d’autres exemples en tapant dans google par exemple « arduino cat feeder » ou même « arduino fish feeder » …
Bref, je voulais donc nourrir mes 2 chats lorsque je part quelques jours (2 ou 3 maxi) , ils ne savent pas se réguler 🙂 Et comme ils ne mangent pas à la même vitesse, au bout de un jour le plus glouton des deux à déjà tout fini !
Voici à quoi ça ressemble une fois fini :
Extérieur :

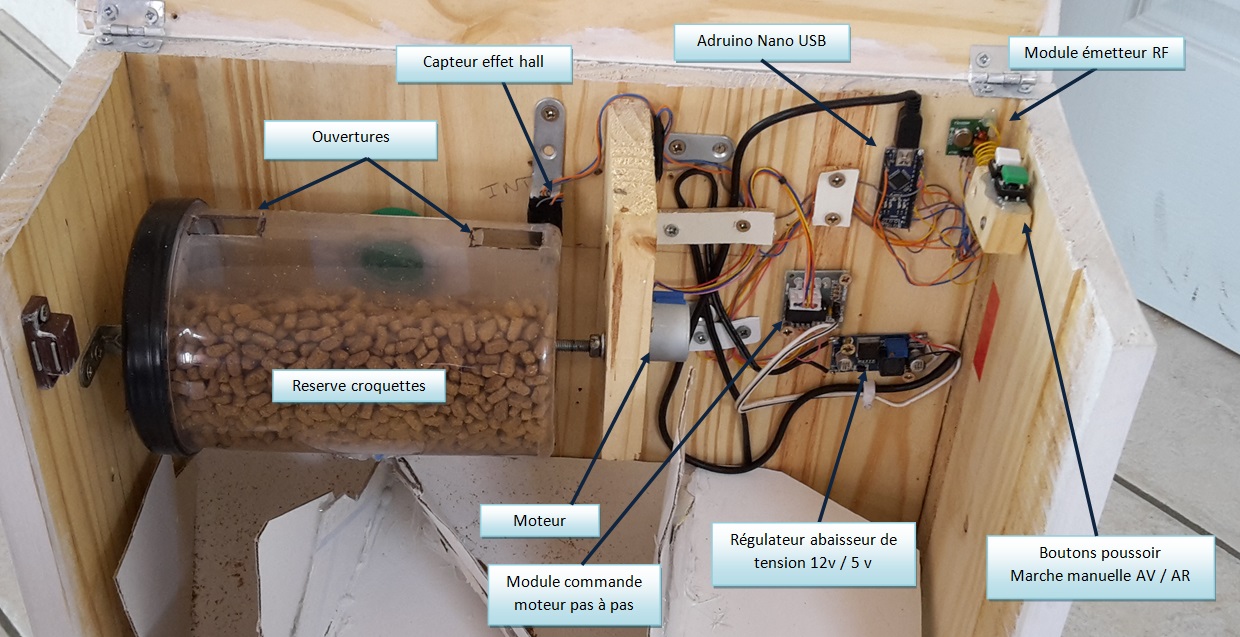
Intérieur :
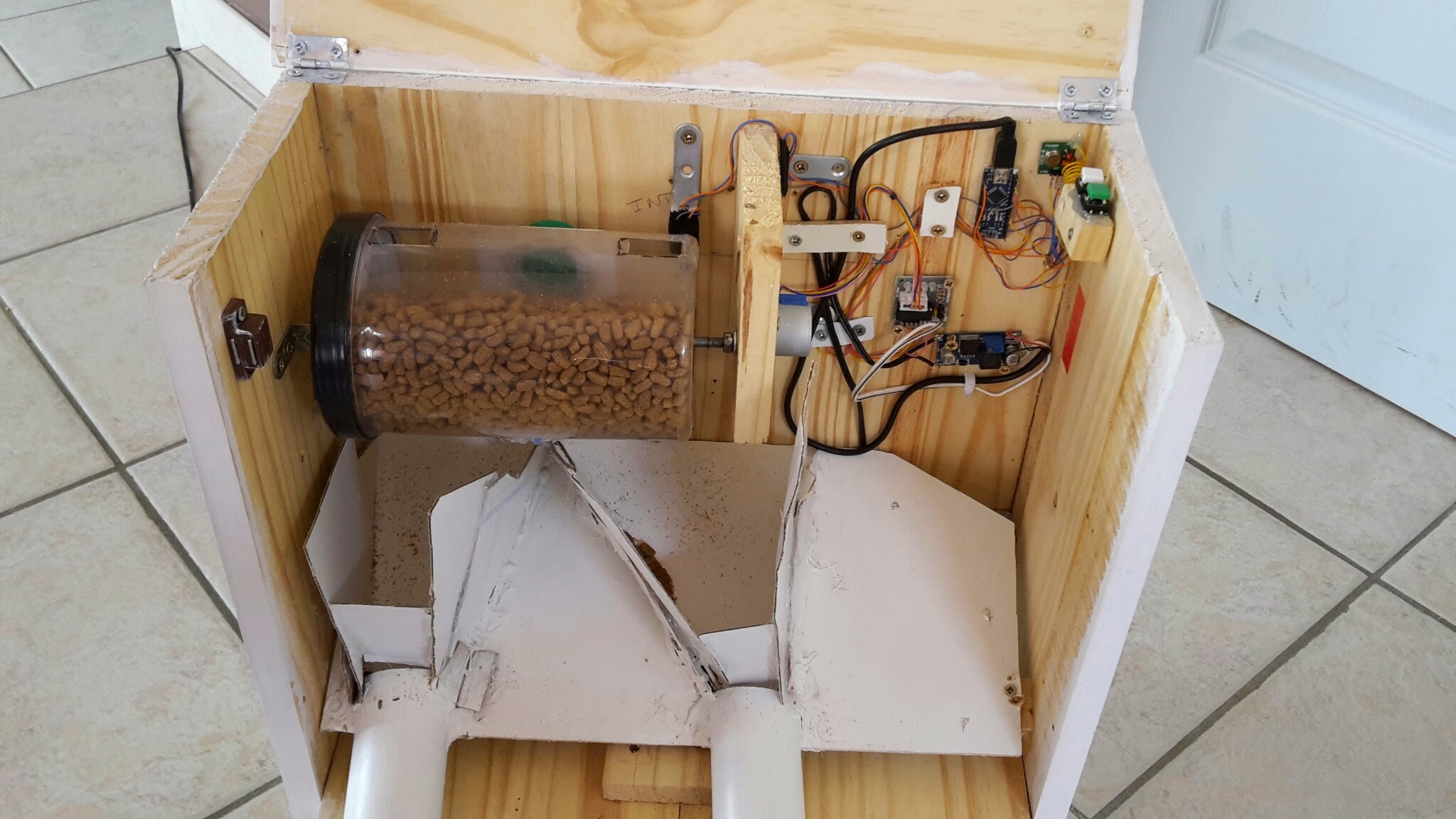
Détails :





Étape 1 les composants
- Respberry b+ *
- Rfxcom *
- Ardiuno Nano USB – 2.5€
- module radio frequence 433Mhz – 1€
- moteur pas à pas et module de contrôle ( 28BYJ-48 et Module de contrôle ULN2003A) 2.5€
- alim 12v récupérée (prévoyez un minimum de 1 A)
- abaisseur de tension 12v/5v LM2596S DC-DC (inutile si vous avez dejà un alim 5v puissante) 2.5€
- capteur à affect hall A3144, divers résistance et bouton poussoir : ~5€
- quelques planches
- un tubes de pvc 4€
- Prise commandé RF (pas indispensable)
* si vous possédez déjà ces éléments inutiles d’en racheter.
Donc dans mon cas ça à du me coûter entre 20 et 25€ au total.
Étape 2 les composants électrique.
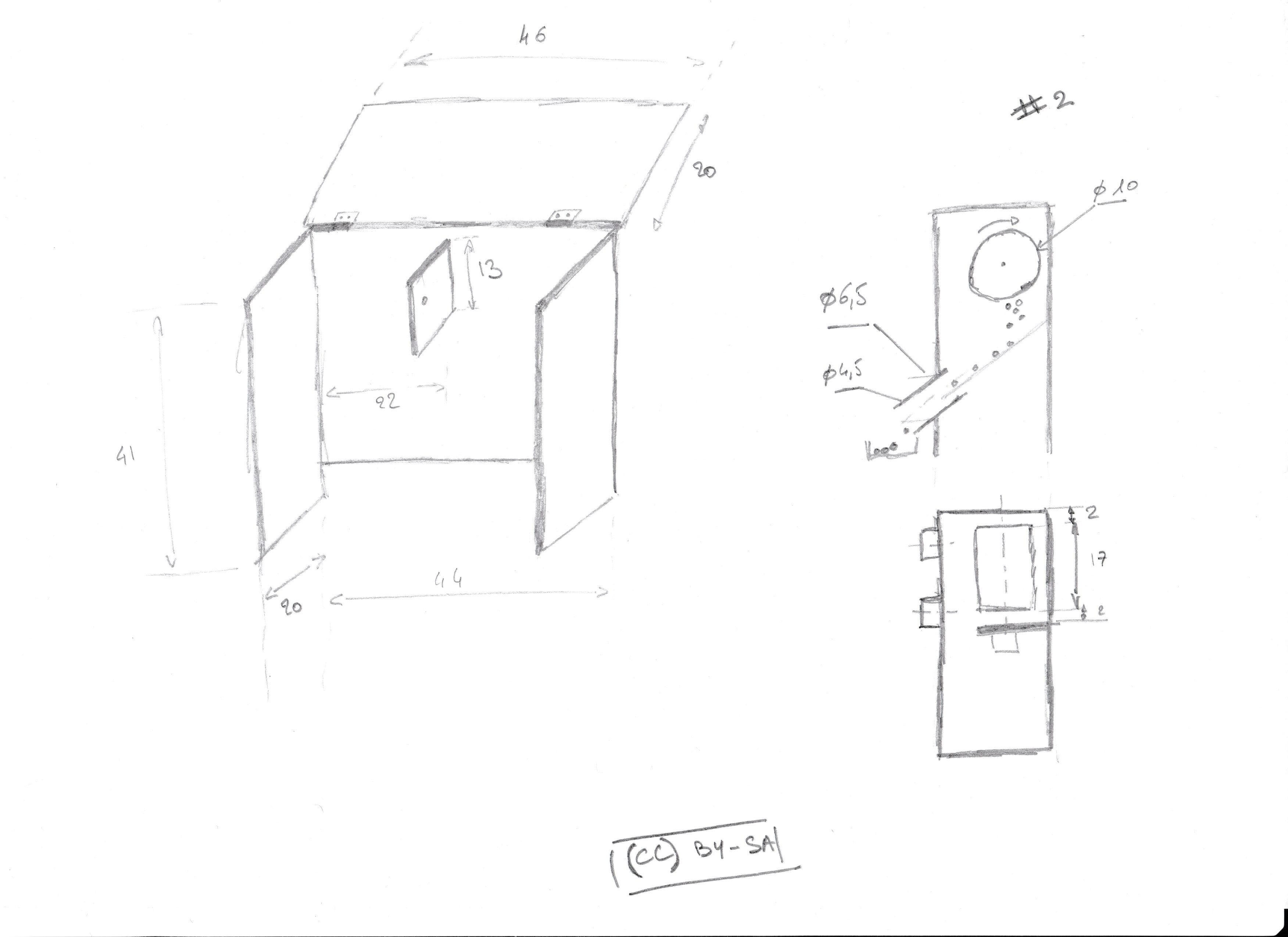
Étape 3 fabrication du distributeur
Voici les plans simplifiés de la construction de la « boite ». J’ai utilisé des planches en pin de 20 cm de largeur que l’on trouve facilement et pour pas cher chez brico depot, bricomarché ou Casto. Environ 6€ la planche 20cm x 2.50m épaississeur 4mm.
Etape 4 : Principe de fonctionnement
J’ai fait le choix de commander le tout via une prise télécommandée radio fréquence. Vous pouvez remplacer cette prise télécommander et la fabriquer vous même pour 6€ en suivant ce tutoriel de idleman ici [REF].
La mise sous tension de l’ensemble des éléments se fait donc via l’interface domoticz (ou via la télécommande de la prise). Une fois la carte arduino sous tension, après quelque secondes, le mode automatique commence et un tour complet va s’effectuer libérant ainsi une dose de croquettes. Le moteur s’arrête lorsque le capteur à effet hall détecte l’aimant collé sur le cylindre. Le moteur pas à pas ayant tendance à décaler et donc à ne pas finir sont tour (en fonction de la charge), le capteur permet de toujours avoir en mode arrêt, le cylindre arrêté avec les ouvertures vers le haut. Une fois le tour complet effectué, un signal est envoyé au RFXcom et à domoticz pour informer que le tour et fini. cela permet de valider que le moteur n’est pas bloqué et qu’il fini bien fini son tours à chaque fois. J’utilise pour envoyer l’information du arduino vers RFXCOM la librairie x10rf (voir les source ici).
Le mode manuel permet d’interrompre le mode automatique à tout moment et de faire tourner dans un sens ou dans l’autre le cylindre pour permettre par exemple de positionner le cylindre pour le remplissage.
En mode manuel, un appuis cours sur un des boutons va déclencher de démarrage du moteur jusqu’au capteur de fin de course. Un appuis long permet un déplacement jusqu’à la position souhaitée (un peu comme les postes autoradio pour la recherche des ondes radios).
Etape 5 : le code
j’utilise plusieurs librairies, la première est « Stepper » la libraire qui permet de commander le moteur pas à pas. Pas besoin de la télecharger elle est déjà dans les librairie fournies avec l’environnement arduino.
La seconde est x10rf qui permet d’envoyer des données au RXCcom dans un format qu’il comprend (rfxmeter, RFXsensor … ) Vous trouverez toutes les informations sur cette librairie ici : Lien 1 sources, Lien 2.
Télécharger le fichier zip : cats_box
Une fois le fichier téléchargé il faut déplacer le répertoire x10rf dans votre répertoire librairie.
Votre avis ? Laissez un commentaire ça fera toujours plaisir 🙂