 Voici un article qui explique comment j’ai réalisé un distributeur de croquettes pour 2 chats à base de raspberry et Arduino… Pilotable par intenet, et programmable à souhait. Je ne rentre pas dans tous les détails de la conception car le but est surtout de vous donner des idées si vous chercher à réaliser un distributeur. Je me suis moi-même beaucoup inspiré des dizaines d’exemples que l’on trouve sur internet. J’ai longuement hésiter à utiliser une vis sans fin mais n’ayant pas le vis ni de quoi la fabriquer (comme ici) j’ai préféré opter pour une autre solution. Je me base sur Domoticz pour ce qui est de la commande de la planification car j’utilise déjà domoticz avec RFXCOM pour d’autres usages (voir mes articles précédents) .
Voici un article qui explique comment j’ai réalisé un distributeur de croquettes pour 2 chats à base de raspberry et Arduino… Pilotable par intenet, et programmable à souhait. Je ne rentre pas dans tous les détails de la conception car le but est surtout de vous donner des idées si vous chercher à réaliser un distributeur. Je me suis moi-même beaucoup inspiré des dizaines d’exemples que l’on trouve sur internet. J’ai longuement hésiter à utiliser une vis sans fin mais n’ayant pas le vis ni de quoi la fabriquer (comme ici) j’ai préféré opter pour une autre solution. Je me base sur Domoticz pour ce qui est de la commande de la planification car j’utilise déjà domoticz avec RFXCOM pour d’autres usages (voir mes articles précédents) .
Voici les principaux sites qui m’ont aidé :
instructables.com, blogouillage.net, project238.blogspot.fr, robovergne.com et pour finir : lafamillecreative.blogspot.fr. Vous trouverez beaucoup d’autres exemples en tapant dans google par exemple « arduino cat feeder » ou même « arduino fish feeder » …
Bref, je voulais donc nourrir mes 2 chats lorsque je part quelques jours (2 ou 3 maxi) , ils ne savent pas se réguler 🙂 Et comme ils ne mangent pas à la même vitesse, au bout de un jour le plus glouton des deux à déjà tout fini !
Voici à quoi ça ressemble une fois fini :
Extérieur :

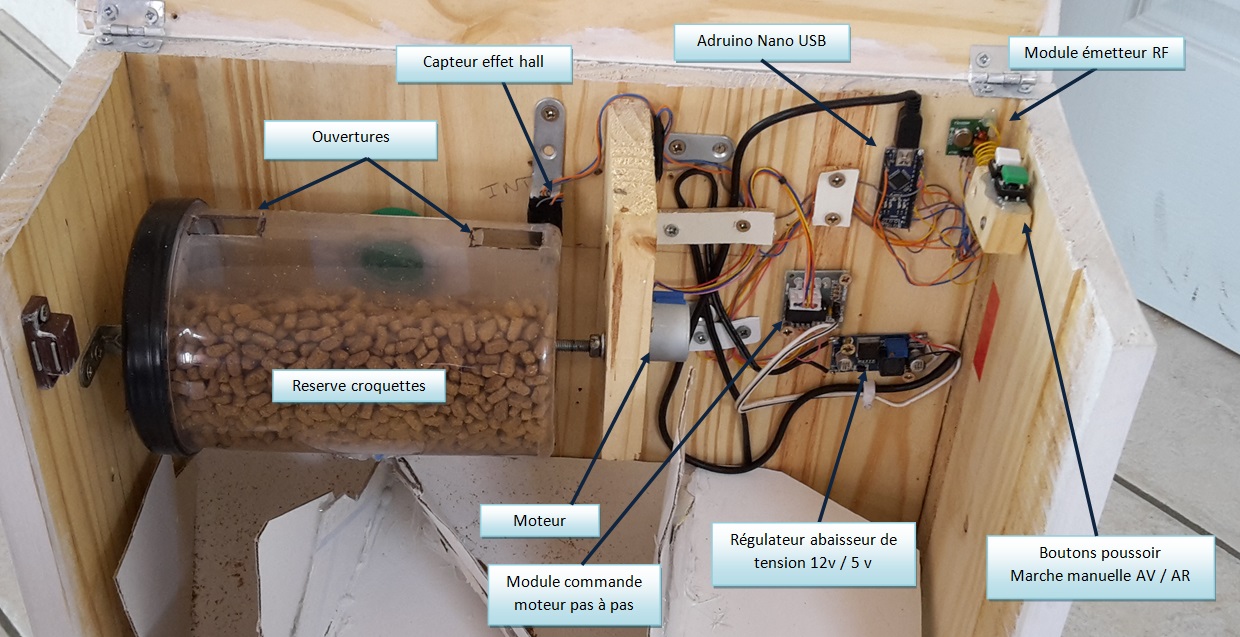
Intérieur :
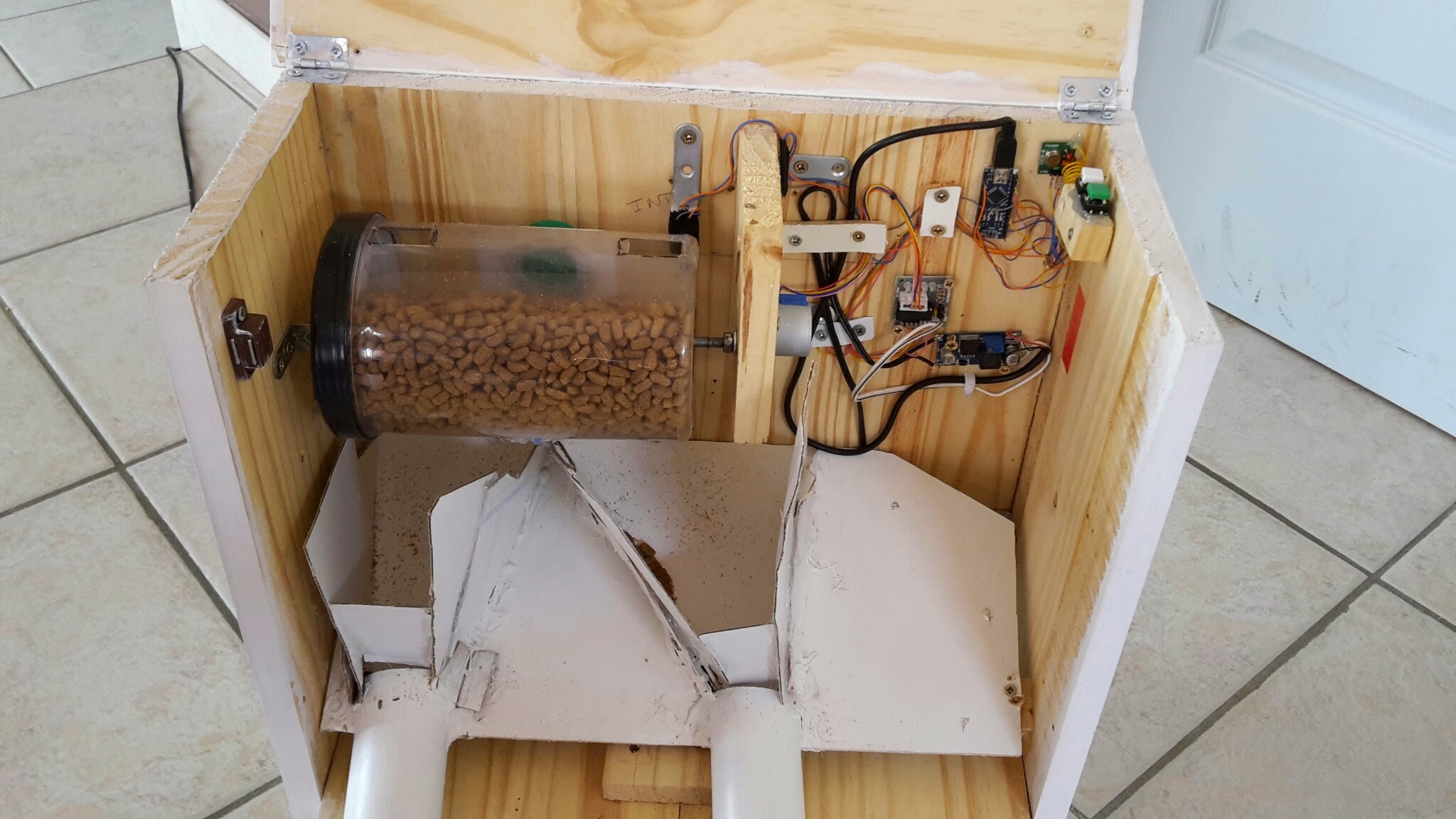
Détails :
-

- type de boulon utilisé

-

- vue d’ensemble boite vide

-

- coté moteur

-

- coté coteur

-

- coté opposé moteur

Étape 1 les composants
- Respberry b+ *
- Rfxcom *
- Ardiuno Nano USB – 2.5€
- module radio frequence 433Mhz – 1€
- moteur pas à pas et module de contrôle ( 28BYJ-48 et Module de contrôle ULN2003A) 2.5€
- alim 12v récupérée (prévoyez un minimum de 1 A)
- abaisseur de tension 12v/5v LM2596S DC-DC (inutile si vous avez dejà un alim 5v puissante) 2.5€
- capteur à affect hall A3144, divers résistance et bouton poussoir : ~5€
- quelques planches
- un tubes de pvc 4€
- Prise commandé RF (pas indispensable)
* si vous possédez déjà ces éléments inutiles d’en racheter.
Donc dans mon cas ça à du me coûter entre 20 et 25€ au total.
Étape 2 les composants électrique.
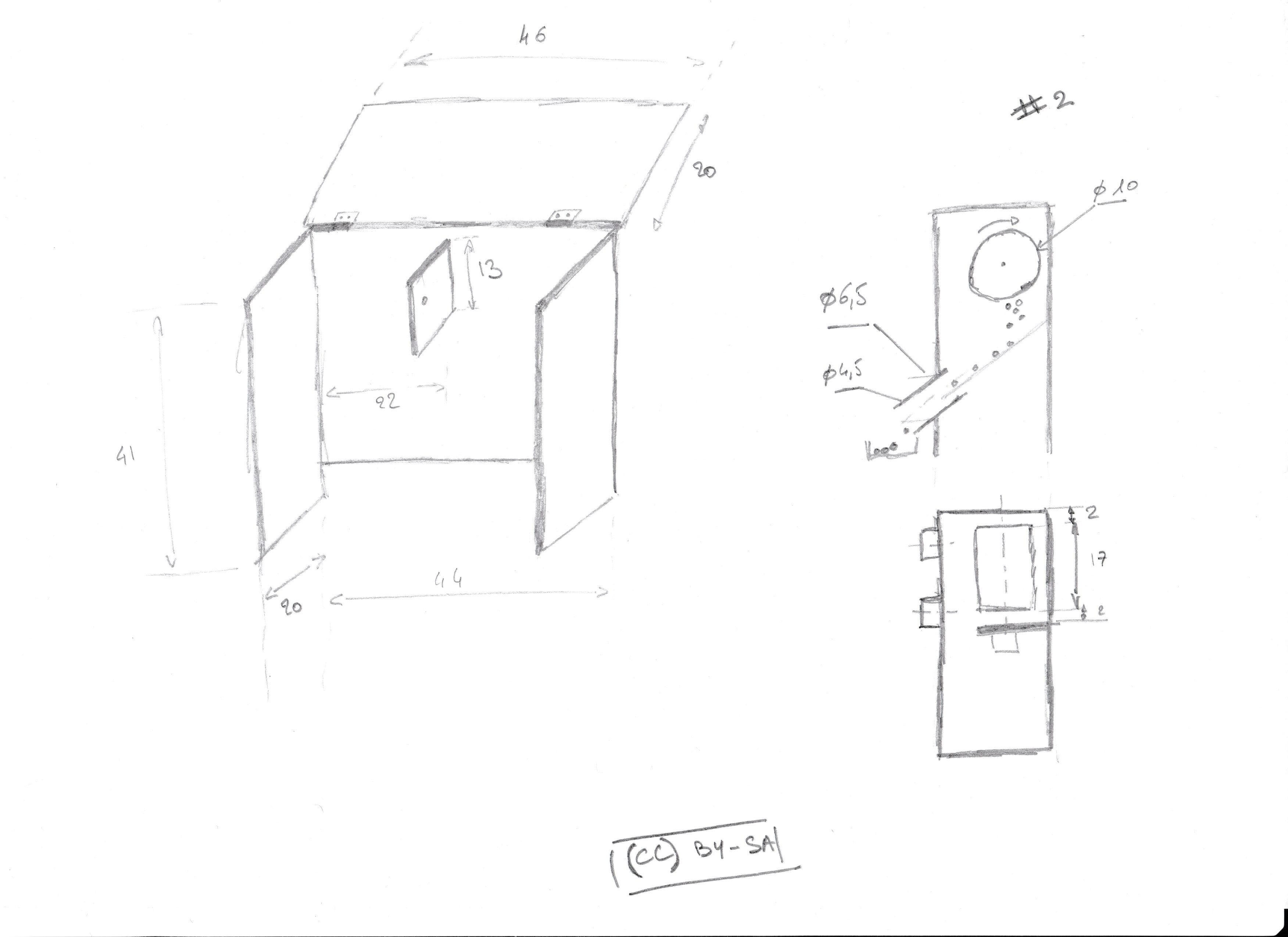
Étape 3 fabrication du distributeur
Voici les plans simplifiés de la construction de la « boite ». J’ai utilisé des planches en pin de 20 cm de largeur que l’on trouve facilement et pour pas cher chez brico depot, bricomarché ou Casto. Environ 6€ la planche 20cm x 2.50m épaississeur 4mm.
Etape 4 : Principe de fonctionnement
J’ai fait le choix de commander le tout via une prise télécommandée radio fréquence. Vous pouvez remplacer cette prise télécommander et la fabriquer vous même pour 6€ en suivant ce tutoriel de idleman ici [REF].
La mise sous tension de l’ensemble des éléments se fait donc via l’interface domoticz (ou via la télécommande de la prise). Une fois la carte arduino sous tension, après quelque secondes, le mode automatique commence et un tour complet va s’effectuer libérant ainsi une dose de croquettes. Le moteur s’arrête lorsque le capteur à effet hall détecte l’aimant collé sur le cylindre. Le moteur pas à pas ayant tendance à décaler et donc à ne pas finir sont tour (en fonction de la charge), le capteur permet de toujours avoir en mode arrêt, le cylindre arrêté avec les ouvertures vers le haut. Une fois le tour complet effectué, un signal est envoyé au RFXcom et à domoticz pour informer que le tour et fini. cela permet de valider que le moteur n’est pas bloqué et qu’il fini bien fini son tours à chaque fois. J’utilise pour envoyer l’information du arduino vers RFXCOM la librairie x10rf (voir les source ici).
Le mode manuel permet d’interrompre le mode automatique à tout moment et de faire tourner dans un sens ou dans l’autre le cylindre pour permettre par exemple de positionner le cylindre pour le remplissage.
En mode manuel, un appuis cours sur un des boutons va déclencher de démarrage du moteur jusqu’au capteur de fin de course. Un appuis long permet un déplacement jusqu’à la position souhaitée (un peu comme les postes autoradio pour la recherche des ondes radios).
Etape 5 : le code
j’utilise plusieurs librairies, la première est « Stepper » la libraire qui permet de commander le moteur pas à pas. Pas besoin de la télecharger elle est déjà dans les librairie fournies avec l’environnement arduino.
La seconde est x10rf qui permet d’envoyer des données au RXCcom dans un format qu’il comprend (rfxmeter, RFXsensor … ) Vous trouverez toutes les informations sur cette librairie ici : Lien 1 sources, Lien 2.
Télécharger le fichier zip : cats_box
Une fois le fichier téléchargé il faut déplacer le répertoire x10rf dans votre répertoire librairie.
Votre avis ? Laissez un commentaire ça fera toujours plaisir 🙂
Bonjour,
Est ce que tu as réussi a calibrer la livraison de croquettes au gramme près? Comment as tu fait? La disposition des croquettes dans le bac, dans le cylindre, à la sortie de du cylindre, peuvent faire perdre 2 ou 3 croquettes. Et lorsqu’il faut donner 25gr précisément, 2 ou 3 croquettes peuvent vite faire une différence de 10%.
D’ou ma question : Comment as tu géré ce besoin de calibration? Et, est ce que après multiples essais de calibrations de position de ton aimant, tu arrive a avoir toujours le meme grammage au gramme près?
Merci, et jolie travail en tout cas !!!
Salut,
effectivement le calibrage n’est pas précis avec cette solution. En fait ça vari un peu aussi en fonction du chargement du bac. Au début quand le bac est plein le poids fait que les croquettes sont poussée contre la parois du rouleau et donc tombent moins bien que lorsque le rouleau est pratiquent vide. Pour le gramme prêt faudra revoir ma copie.
Malgré tout si tu n’as pas des besoins précis ça va très bien! Avant je me servait d’un verre doseur et c’était pas beaucoup plus précis.
Il suffit de calculer par jour le nombre de tour de rouleau que tu as besoin en pesant une dose…
Génial cette invention. Personnellement je n’ai pas confiance en Domoticz qui plante de temps en temps. Alors pour une utilisation quotidienne pourquoi pas, mais pour une absence il faudrait pouvoir débrayer et laisser le bouzin autonome avec distribution une ou deux fois par jour 😛 En tous cas c’est la même logique que les distributeurs de nourriture pour poisson Juwel (fonctionnent à piles)
Bonjour Manu,
Je suis très intéréssé par ta solution qui semble convenir tout à fait à mes besoins, j’aimerai du coups coupler tout ça avec ma centrale domotique sous Jeedom.
J’aimerais savoir s’il était possible de ta part de m’envoyer un peu plus de détail concernant ta solution (je suis un parfait débutant mais je ne demande qu’à apprendre.
Merci dans tous les cas de ta réponse qu’elle soit négative ou positive 😉
Bonjour Rec!
je peux te communiquer avec plaisir tout ce dont tu as besoin. Dis moi juste quel détail tu as besoin de plus, et sur quelle partie.
Tu as déjà la liste de composant et le code arduino… N’hésites pas i tu as besoin d’information spécifique !
A+
Bonjour Manu,
Merci déjà de m’avoir répondu, je voulais savoir d’une part au niveau de ta réserve de croquette, elle est bien transpercée par une tige filetée qui est directement reliée au moteur PàP ?
C’est juste cette partie qui m’interpelle savoir comment tu as relié tout ça !
Bon dimanche !
Bonjour !
effectivement la partie « mécanique » est celle pour laquelle j’ai passé le plus de temps !
J’ai utilisé une boite de collier électrique qui traînait chez moi (par exemple voir ici chez Leroy merlin https://goo.gl/hMHGNH ) .
J’ai percé au centre du couvercle et au centre du fond un trou par lequel j’ai fixé de chaque côté deux boulons (ce n’est pas une seule tige traversante). le boulon coté opposé moteur rentre dans une équerre à 90° à laquelle j’ai fait une second angle à 90°. De l’autre coté le boulon est couplé au moteur.
Je viens de rajouter des photos à l’article, j’espère que ça t’aidera 🙂
A+
Super merci beaucoup de partager tes travaux ! y’a plus qu’à !
merci
Super !!!
Ton moteur pàp est un à 4 ou 5 câbles ?
J’ai un pàp du kit arduino 5 fil qui se connecte à son driver avec une petite fiche blanche mais ce moteur est trop faible, j’ai donc acheté un NEMA 17 mais pas de connecteur ! et seulement 4 fils …
Je crois savoir qu’il faut un L298 conecté sur l’arduino directement …
Tu sais m’aider sur cette question ?
Merci !